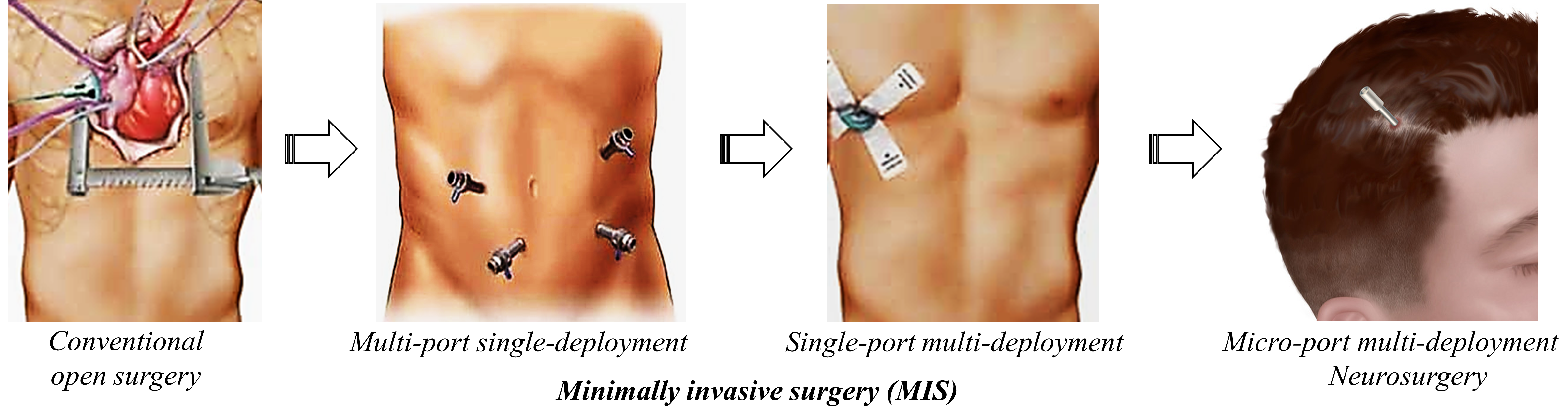
 Figure 1. Paradigm shift from traditional open surgery to minimally invasive surgery.
Figure 1. Paradigm shift from traditional open surgery to minimally invasive surgery.
The evolution in medical intervention from traditional open surgery to minimally invasive surgery (MIS) has resulted in improved surgical outcomes such as less patient trauma, less blood loss, and shorter recovery time (see Fig. 1). These improvements are due to miniature incisions compared to the large openings in the patient’s body. However, this technique has significant challenges such as difficulty in accessing surgical targets through complex 3D paths and the ability to control the rigid instruments due to limited maneuverability, dexterity, and degrees of freedom [1]. The goal of robotic-assisted surgery was to improve surgical procedures while maintaining the advantages of open surgery in MIS [2]. These include facilitating easy access to complex or hard-to-reach surgical targets with greater dexterity and DoFs, enhanced visualization of the anatomy; improved tool deployment precision/accuracy; reduced surgeon hand tremors and fatigue during tool manipulation or teleoperation [3]. All these have paved the way for developing different MIS intervention tools and instruments categorized into three by Dupont et al.[4] as presented in Fig. 2.
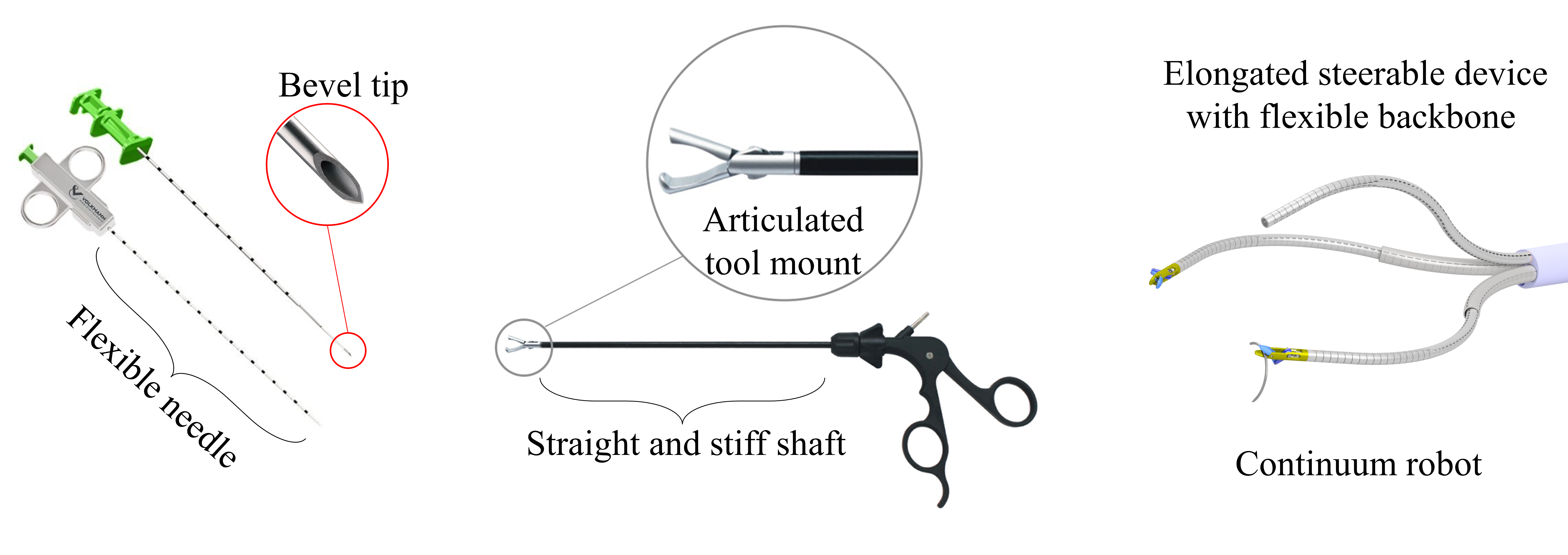 Figure 2. The three classes of MIS intervention instruments A) Flexible needle with a straight shaft having a bevel tip that steers and changes its direction upon application of lateral force at the base. Its drawback is high dependence on solid tissue penetration to produce lateral tip motion and secondly, it cannot maneuver through curved cavity/anatomy, B) Straight and stiff shaft with a tip-mounted articulated tool, which reaches the surgical site through a straight path. It is difficult to steer through complex anatomy and the tool manipulation can often cause tissue deformation e.g. forceps and da Vinci, Intuitive Surgical tools, C) Elongated steerable device with a flexible backbone. They consist of flexible catheters or multistage dexterous devices like continuum robots.
Figure 2. The three classes of MIS intervention instruments A) Flexible needle with a straight shaft having a bevel tip that steers and changes its direction upon application of lateral force at the base. Its drawback is high dependence on solid tissue penetration to produce lateral tip motion and secondly, it cannot maneuver through curved cavity/anatomy, B) Straight and stiff shaft with a tip-mounted articulated tool, which reaches the surgical site through a straight path. It is difficult to steer through complex anatomy and the tool manipulation can often cause tissue deformation e.g. forceps and da Vinci, Intuitive Surgical tools, C) Elongated steerable device with a flexible backbone. They consist of flexible catheters or multistage dexterous devices like continuum robots.
With lots of different progress today, there are still huge areas in medical intervention needing technological improvements. The majority of these demands have been in the area of developing smart devices with better properties and characteristics for targeted applications. These include achieving high overall robot miniaturization for possible handheld capability and single-port deployability. Among other features are high dexterity, high precision, high maneuverability, and safer robot-to-human interaction. To that effect, all these have resulted in the paradigm shift in medical robotics research, from the traditional rigid robot to the continuum (continuously deformable) and soft robots. This emerging field of research has drawn enormous focus today due to its overwhelming potential and benefits.
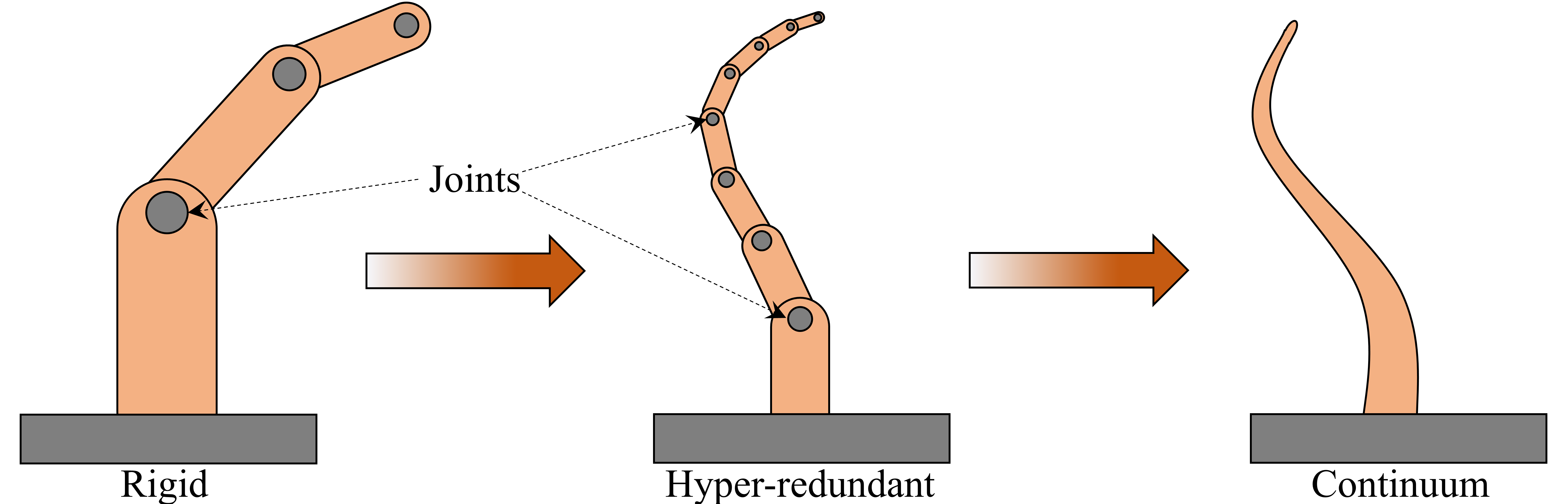 Figure 3. Transition from conventional rigid robot to continuum robot due to its benefits, A) a typical conventional serial robot with discrete links connected by joints B) a hyper-redundant type of rigid robot in order to increase its dexterity and maneuverability, C) continuum robot type with infinite DOFs and deformable link(s) which is safer for human-to-robot interaction.
Figure 3. Transition from conventional rigid robot to continuum robot due to its benefits, A) a typical conventional serial robot with discrete links connected by joints B) a hyper-redundant type of rigid robot in order to increase its dexterity and maneuverability, C) continuum robot type with infinite DOFs and deformable link(s) which is safer for human-to-robot interaction.
One of the key challenges in MIS is navigating to the surgical site through complex 3D curves while avoiding sensitive organs or bony structures and most preferably passing through a natural body orifice e.g. nose, mouth, or ear. In fact, on reaching the surgical site, the next issue is the capability to control its distal tip, while the proximal end is held relatively immobile during tool manipulation. These have motivated the constant rise in the development of smart compact devices with the possibility of teleoperation, as seen in the high research throughput on continuum robots today. Comparing the three categories of MIS intervention instruments (see Fig. 3), the continuum robots which includes the concentric tube robots (CTRs), tendon-driven, and parallel continuum robot (PCR) possess the best properties of all the three types [4]. The reasons for the paradigm shift in the field of robotics from conventional robots that are composed of rigid links connected by discrete joints to continuum robots as shown in Fig. 3 include:
- 1. Infinite degree of freedom thanks to its continuously deformable backbone meaning high dexterity and maneuverability,
- 2. Provides much more safe human-to-robot interaction due to its inherent compliant property,
- 3. With all the motors/actuators located externally at the proximal end, this makes the robot suitable for MIS.
These have given rise to the creation and upsurge of new research communities/clusters around the globe focusing on continuum robots. Today, there are vastly different design prototypes and publications on continuum robots as the majority of them are proposed for medical applications [5],[6]. Though, this is discussed extensively in the state-of-the-art of the two continuum robots of interest. Notably, the benefits and advantages of MIS today are undeniable and these are the driving force for the several proposed use of continuum robots due to their scalability. Even with the current state-of-the-art of continuum robots, there are still demands for further invasiveness, which are aimed at accessing hard-to-reach surgical regions in clinical interventions. These have resulted in the need for miniaturization of clinical instruments/devices, which are detailed further below.
References
- 1. Vitiello V, Lee S-L, Cundy TP, Yang G-Z: Emerging Robotic Platforms for Minimally Invasive Surgery. IEEE Reviews in Biomedical Engineering 2013, 6:111–126.
- 2. Satava R: Robotic surgery: From past to future - A personal journey. The Surgical clinics of North America 2004, 83:1491–500, xii.
- 3. Satava RM: Future Directions in Robotic Surgery. In Surgical Robotics: Systems Applications and Visions. . Springer US; 2011:3–11.
- 4. Dupont PE, Lock J, Itkowitz B, Butler E: Design and Control of Concentric-Tube Robots. IEEE Transactions on Robotics 2010, 26:209–225.
- 5. Jones BA, Walker ID: A New Approach to Jacobian Formulation for a Class of Multi-Section Continuum Robots. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation. . 2005:3268–3273.
- 6. Yang G-Z, Bellingham J, Dupont PE, Fischer P, Floridi L, Full R, Jacobstein N, Kumar V, McNutt M, Merrifield R, et al.: The grand challenges of Science Robotics. Science robotics 2018, 3:eaar7650.